WBCD 2026 Competition Track
Authoritative source. This page is a readable summary. The wbcd_tasks GitHub repository holds the authoritative, most up-to-date task specifications, scoring rules, bills of materials, and CAD/STL files. If anything here disagrees with the repo, the repo wins.
Autonomy Levels & Run-Based Scoring
Every track in this competition supports all three autonomy levels — teams choose whichever best fits their system. Teleoperation may be performed with any controller of the team's choice (e.g., VR headset, inertial motion capture suit); fully autonomous runs use a learned or programmed policy end-to-end with no human control during execution.
Teams declare one autonomy level per run (before the run starts). The sum of base points earned in that run is multiplied by the corresponding multiplier. The same level applies to every item/step inside the run — teams do not switch mid-run. Different runs may use different autonomy levels.
| Level | Description | Multiplier |
|---|---|---|
| On-site Teleoperation | Human operator is physically present and controls the robot with direct line-of-sight | ×1 |
| Remote Teleoperation | Human operator controls the robot remotely via video feed only (no direct view of the scene; network latency applies) | ×2 |
| Fully Autonomous | No human control during execution; the robot runs a learned or programmed policy end-to-end | ×4 |
What counts as a “run” is defined per track:
- Track 1 — Logistics Picking: one 10-minute block (each team gets 2 runs, 20 min total)
- Track 2 — Logistics Packing: one item through pick → scan → place
- Track 3 — WBCD XtalPi Lab Experiments Track: one round (Steps 1 → 2 → 3)
- Track 4 — Deformable Manipulation: one complete T-shirt cycle (Steps 1 → 2 → 3)
Note: The multipliers above are competition-wide defaults. The optimal multiplier for a given task ultimately depends on its difficulty and content — these presets serve as a balanced starting point and may be adjusted per track in future editions.
Track 1: Logistics Picking
Robot from UnitreeAutonomy & scoring: Supports on-site teleop (×1), remote teleop (×2), and fully autonomous (×4) — teams declare one level per run. Here, one run = a 10-minute block (each team gets 2 runs, 20 min total). See Autonomy Levels & Run-Based Scoring above for details.
Canonical spec: track-1-logistics-picking/README.md on GitHub is the authoritative, most up-to-date reference for this track.
Robot Demonstration
Teleop real robot video from Unitree -- bring your best and do even better!
This task focuses on whole-body control and end-effector coordination utilizing the Unitree G1 humanoid robot. The objective is to bridge the gap between research and practical application by simulating a logistics scenario in which items of varying difficulty must be transferred from shelves of different heights to a transport vehicle. The system relies solely on the robot's onboard perception to execute complex maneuvers including upright, bent, and crouched postures.

End effectors: A pair of end effectors (clamps, three-finger or five-finger dexterous hands)
Allowed modes: On-site teleoperation, remote teleoperation, or fully autonomous. For teleop runs, any controller of the team's choice is allowed (e.g., VR headset, inertial motion capture suit). For fully autonomous runs, no human control is permitted during execution.
Task Rules
The competition time budget is 20 minutes, split into two 10-minute runs. The goal is to complete as many item transfers as possible across the two runs.
- Runs: Each team gets exactly 2 runs of 10 minutes each. Teams declare one autonomy level per run (on-site teleop, remote teleop, or fully autonomous) before the run starts. The same level applies to every item in that run; the two runs may use different levels.
- Control: Teleop runs may use any controller of the team's choice (e.g., VR headset, inertial motion capture suit). Fully autonomous runs permit no human control during execution.
- Perception: Participants must acquire external information solely through the robot's onboard perception system.
- Capacity: Within a run, there is no limit on the number of items the team attempts to transfer, provided they are not dropped.
Step 1: Shelf Picking
Navigate the robot to the shelving unit and extract items. The difficulty varies by shelf height, requiring specific body postures.

| Action | Description | Posture |
|---|---|---|
| 1a | Pick item from Top Shelf | Upright Position |
| 1b | Pick item from Middle Shelf | Bent Position |
| 1c | Pick item from Bottom Shelf | Crouched Position |
Success Criteria: Item securely grasped from the shelf without knocking over other items.
Step 2: Transportation
Transport the grasped items from the shelving area to the designated unloading area.
| Action | Description |
|---|---|
| 2a | Stabilize item(s) during locomotion |
| 2b | Navigate to the transport vehicle/table |
Success Criteria: Maintain grasp on items throughout the movement. Drops result in penalties.
Step 3: Placement
Place the items onto the transport vehicle or unloading table.
| Action | Description |
|---|---|
| 3a | Position item over target area |
| 3b | Release item securely |
Success Criteria: Item rests stably on the unloading surface.
Scoring
Scoring is weighted based on the difficulty of the whole-body motion required (posture).
| Source | Posture | Points | Criteria |
|---|---|---|---|
| Top Shelf | Upright | +5 | Successful transfer from high shelf |
| Middle Shelf | Bent | +8 | Successful transfer from middle shelf |
| Bottom Shelf | Crouched | +10 | Successful transfer from bottom shelf |
| Item Drop | — | -3 | Per item dropped during transportation |
Autonomy multiplier. Base points from all successful transfers in a 10-minute run are summed, then multiplied by that run's autonomy multiplier (×1 / ×2 / ×4). The same level applies to every item in the run; the two runs may use different levels. See Autonomy Levels & Run-Based Scoring at the top of the page.
Example
A team's two 10-minute runs, each with its own declared autonomy level:
| Run | Autonomy | Transfers | Base total | Multiplier | Run score |
|---|---|---|---|---|---|
| Run 1 | Remote teleop | 4 top (+20) + 2 mid (+16) + 1 bot (+10) − 2 drops (−6) | 40 | × 2 | 80 |
| Run 2 | Fully autonomous | 2 top (+10) + 1 mid (+8) − 1 drop (−3) | 15 | × 4 | 60 |
| Total | 140 | ||||
Items Used in This Task
Full Bill of Materials with quantities, prices, and supplier links: track-1-logistics-picking README → Bill of Materials.
Human Demonstration
Sample task execution by a human operator for demonstration purposes.
Track 2: Logistics Packing
Robot from GalaxeaAutonomy & scoring: Supports on-site teleop (×1), remote teleop (×2), and fully autonomous (×4) — teams declare one level per run. Here, one run = one item through pick → scan → place. See Autonomy Levels & Run-Based Scoring above for details.
Canonical spec: track-2-logistics-packing/README.md on GitHub is the authoritative, most up-to-date reference for this track.
The objective of this challenge is to demonstrate robotic capabilities in logistics fulfillment. The system must pick, scan, and pack items from a primary storage container into three designated shipping parcels. The workflow involves handling diverse items (rigid boxes, irregular shapes, and soft apparel), identifying barcodes via wrist-mounted cameras, and securing the parcels by closing their lids.
Task Rules
The competition window is 30 minutes. Teams must fulfill as many shipping parcels as possible within this time.
- Placement: Participants may configure the placement of storage containers, shipping parcels, and the table.
- Reset Time: Time spent on scene resets is excluded from the 30-minute competition window.
- Human Intervention: If a human intervenes during a cycle, the task for that specific item is terminated immediately, and a partial score is recorded.
- Autonomy (per run): A run = one item taken through pick → scan → place. Teams declare one autonomy level per item/run (×1 / ×2 / ×4), not per workflow step. Different items in the same 30-minute window may use different autonomy levels.
Step 1: Picking & Scanning
Grasp an item from the storage container and identify it. The container is pre-loaded with various items (boxes, irregular objects, soft bags).
| Action | Description |
|---|---|
| 1a | Grasp and extract an item from the storage container |
| 1b | Scan the barcode using a wrist-mounted camera |
| 1c | Receive index corresponding to one of the 3 shipping parcels |
Success Criteria: Item securely grasped, barcode successfully identified, target parcel determined.
Step 2: Placing
Transition the picked item to the designated shipping parcel.
| Action | Description |
|---|---|
| 2a | Move the item to the assigned shipping parcel |
| 2b | Place the item securely inside the parcel |
Success Criteria: Item placed in the correct parcel (1 of 3) without dropping.
Step 3: Packing (Lid Closing)
Once a parcel is full or the sequence is complete, operate the parcel lid mechanism to secure the package.
| Action | Description |
|---|---|
| 3a | Fold the box lid flat |
| 3b | Tuck in the two-sided lips |
| 3c | Engage the locking lid mechanism |
Success Criteria: Lid is closed flat, lips are tucked, and the box is locked.
Scoring
Item Processing
| Action | Points | Criteria |
|---|---|---|
| Pick, Scan, Place | +5 | Successfully picks, scans, and places one item |
| Wrong Parcel | -5 | Item placed in incorrect parcel |
Parcel Finalization (Lid Closing)
Points for lid closing are cumulative based on the quality of the fold.
| Action | Points | Criteria |
|---|---|---|
| Lid Flat | +5 | Box lid is covered flat without item sticking out |
| Side Lips | +10 | The two-sided lips both stick in |
| Locking Lid | +15 | Locking mechanism securely sticks in |
Autonomy multiplier. Each item's pick → scan → place is one run. Base points for that item are multiplied by the run's autonomy multiplier (×1 / ×2 / ×4). Teams declare one level per item/run, not per workflow step. See Autonomy Levels & Run-Based Scoring at the top of the page.
Example
A robot processes an item incorrectly and one correctly, then successfully closes a parcel fully (base points, before applying per-run autonomy):
| Event | Result | Score |
|---|---|---|
| Item A | Pick/Scan/Place (+5) but Wrong Parcel (−5) | 0 |
| Item B | Pick/Scan/Place Correctly | +5 |
| Parcel Closing | Locking Lid Fully Closed | +15 |
| Total (base) | 20 | |
Items Used in This Task
Full Bill of Materials with quantities, prices, and supplier links: track-2-logistics-packing README → Bill of Materials.
Track 3: WBCD XtalPi Lab Experiments Track
Robot from AgileX RoboticsAutonomy & scoring: Supports on-site teleop (×1), remote teleop (×2), and fully autonomous (×4) — teams declare one level per run. Here, one run = one round (Steps 1 → 2 → 3). See Autonomy Levels & Run-Based Scoring above for details.
Canonical spec: track-3-lab-experiments/README.md on GitHub is the authoritative, most up-to-date reference for this track.
This task simulates a laboratory automation workflow. The system handles high-density sample racks, interfaces with analytical instruments, and performs reagent bottle operations (threaded caps and flexible tubing). The full task consists of three sequential steps performed in rounds.
Task Rules
The competition time limit is 20 minutes. Teams perform Steps 1 → 2 → 3 in order as one round. After completing a round, the workspace is reset and the next round begins. The goal is to complete as many rounds as possible.
- Mandatory sequence: All three steps must be attempted per round — you cannot skip a step or reorder them. A new round cannot begin until the current round's Step 3 is completed or attempted.
- Reset Time: Time spent resetting the workspace between rounds is excluded from the 20-minute window.
- Cumulative scoring: Points earned in a partially completed round (when time expires) still count.
- Difficulty choice (Step 1 only): Teams select Easy or Hard for Step 1 before each round. The choice applies a score multiplier to Step 1 only (see Step 1 below).
Step 1: Sample Loading
Seat 4 vials (two 2 mL, two 8 mL) into the corresponding racks. Two difficulty levels apply (teams choose before each round). See Scoring below for the per-action breakdown.
Difficulty levels (chosen per round; Step 1 score multiplier):
| Level | Rack state | Target position | Multiplier |
|---|---|---|---|
| Easy | Rack is empty | A corner of the team's choice | ×1.0 |
| Hard | Rack is partially filled (only 4 empty slots remain) | Random empty slots (randomized each round) | ×1.5 |
Start state: Vials placed at random positions on the table within the robot's reachable workspace. Racks placed at designated positions.
End state: All 4 vials fully inserted, upright, in correct positions. No damage or drops.
Step 2: Instrument Interfacing
Load a sample rack into an analytical instrument by operating its drawer mechanism (open, place rack, close). See Scoring below for the per-action breakdown.

Success Criteria: Drawer opened/closed without excessive force. Rack in correct position.
Step 3: Mobile Phase Management
Switch the solvent supply line from bottle A to bottle B by operating the threaded caps and relocating the flexible tubing (remove source cap, remove tubing, insert into target bottle, replace source cap). See Scoring below for the per-action breakdown.
Success Criteria: Caps intact, tubing relocated, bottles upright, no spills.
Scoring
Steps 2 and 3 are worth 20 points each per round. Step 1 base score is 20 points, multiplied by the difficulty factor (×1.0 Easy, ×1.5 Hard → 20 or 30 pts). Maximum round base total is therefore 60 (Easy) or 70 (Hard).
Step 1 — Sample Loading (20 pts base × difficulty)
| Action | Points | Start → End | Criteria |
|---|---|---|---|
| 1a – Seat 2 mL vial | 5 | Vial on table → seated in 2 mL rack | Vial fully inserted, upright, correct position |
| 1b – Seat 2 mL vial | 5 | Vial on table → seated in 2 mL rack | Vial fully inserted, upright, correct position |
| 1c – Seat 8 mL vial | 5 | Vial on table → seated in 8 mL rack | Vial fully inserted, upright, correct position |
| 1d – Seat 8 mL vial | 5 | Vial on table → seated in 8 mL rack | Vial fully inserted, upright, correct position |
Easy mode: 20 × 1.0 = 20 pts max | Hard mode: 20 × 1.5 = 30 pts max
Step 2 — Instrument Interfacing (20 pts)
| Action | Points | Start → End | Criteria |
|---|---|---|---|
| 2a – Open drawer | 5 | Drawer closed → drawer fully extended | Drawer fully extended without excessive force |
| 2b – Place rack | 10 | Rack on table → rack seated in drawer | Rack in correct position and orientation |
| 2c – Close drawer | 5 | Drawer open with rack → drawer fully closed | Drawer fully closed flush with cabinet |
Step 3 — Mobile Phase Management (20 pts)
Start state: tubing inserted in source bottle; cap on target bottle. End state: tubing relocated to target bottle; cap re-secured on source bottle.
| Action | Points | Start → End | Criteria |
|---|---|---|---|
| 3a – Remove cap | 5 | Cap on target bottle → cap removed | Cap unscrewed without stripping or spilling |
| 3b – Remove tubing | 5 | Tubing in source bottle → tubing removed | Tubing cleanly removed from source bottle |
| 3c – Insert tubing | 5 | Tubing in hand → tubing in target bottle | Tubing inserted into target bottle |
| 3d – Replace cap | 5 | Cap removed → cap on source bottle | Cap re-secured on source bottle |
Penalties
| Violation | Penalty |
|---|---|
| Dropped vial | 0 pts for that action (no partial credit) |
| Spilled liquid | 0 pts for that action |
| Damaged equipment (stripped cap, broken vial) | 0 pts for that action |
| Skipped step | Remaining steps in that round score 0 |
Autonomy multiplier. Each round is one run for autonomy. Sum the base points from Steps 1–3 in that round, then multiply by that round's autonomy multiplier (×1 / ×2 / ×4). Teams declare one autonomy level per round; the same level applies to all steps in that round. See Autonomy Levels & Run-Based Scoring at the top of the page.
Example
A team completes 3 full rounds and is mid-way through round 4 when time expires. They choose one autonomy level per round (applied to the sum of Step 1–3 base points for that round):
| Round | Difficulty | Base (Steps 1+2+3) | Autonomy | Subtotal |
|---|---|---|---|---|
| 1 | Easy | 20 + 20 + 20 = 60 | Remote ×2 | 120 |
| 2 | Hard | 30 + 20 + 20 = 70 | On-site teleop ×1 | 70 |
| 3 | Hard | 30 + 15 + 20 = 65 | Fully autonomous ×4 | 260 |
| 4 | Easy | 20 + 10 + 0 = 30 (time expires mid–Step 3) | Remote ×2 | 60 |
| Total | 510 | |||
Items Used in This Task
Full Bill of Materials (with 3D-printed parts and STL/CAD files) and supplier links: track-3-lab-experiments README → Bill of Materials.
Consumables & Reference Dimensions
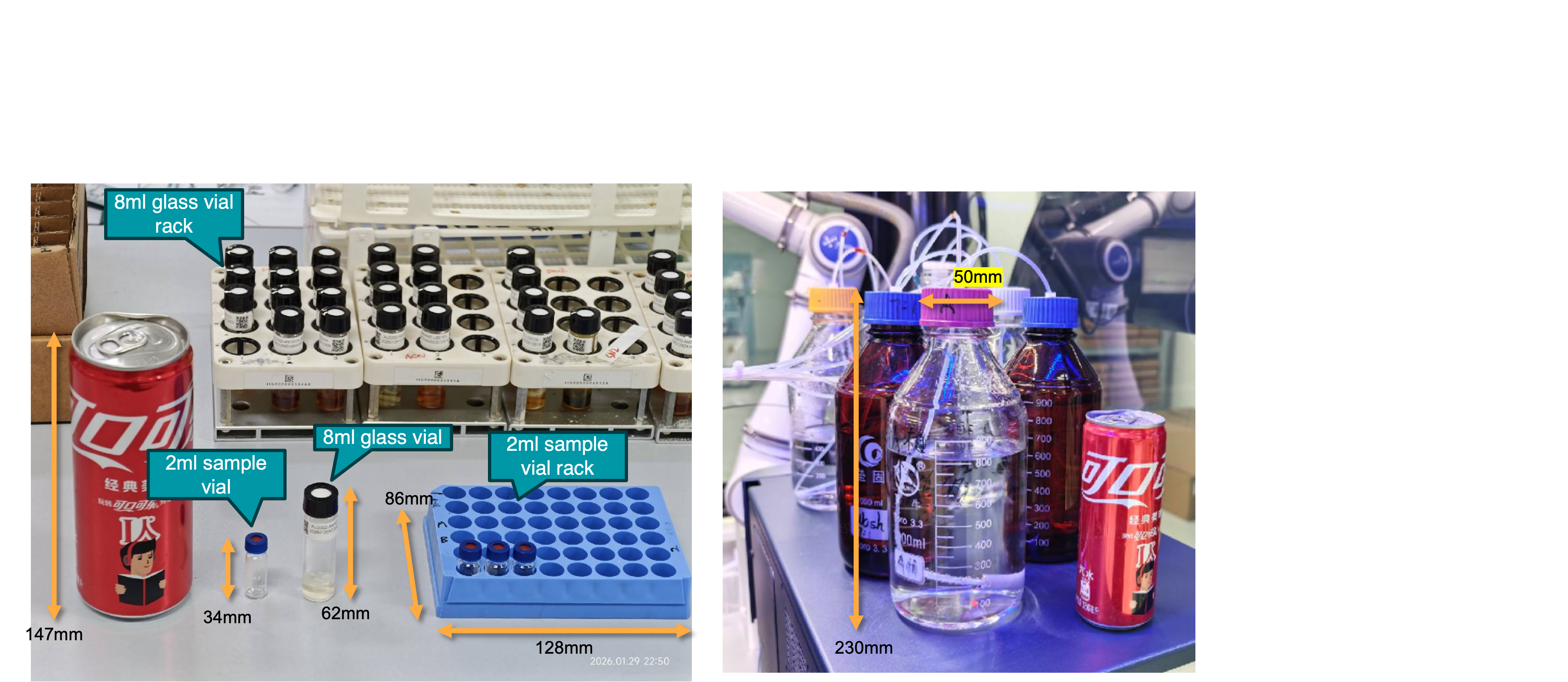
Track 4: Deformable Object Manipulation
Robot from ARXAutonomy & scoring: Supports on-site teleop (×1), remote teleop (×2), and fully autonomous (×4) — teams declare one level per run. Here, one run = one complete T-shirt cycle (Steps 1 → 2 → 3). See Autonomy Levels & Run-Based Scoring above for details.
Canonical spec: track-4-deformable-manipulation/README.md on GitHub is the authoritative, most up-to-date reference for this track.
This task evaluates robotic manipulation of deformable objects in manufacturing scenarios. The robot must pick a T-shirt from a stack and load it onto a printing pallet, demonstrating sophisticated perception and control capabilities for handling flexible materials.
Task Rules
The competition time limit is 15 minutes. The goal is to pick and load T-shirts onto a printing pallet with proper alignment and surface quality.
- Human intervention: Any human intervention (except teleoperation) to the setup during robot movement is penalized. The timer does not stop.
- Reset Time: Time spent resetting the workspace (e.g., restacking T-shirts) is excluded from the 15-minute limit.
- Timer policy: Once the timer starts, manual changes to the setup are not allowed. Any maintenance or repair work does not pause the timer.
- Evaluation handoff: Teams must inform the judges when alignment is finished. The timer stops for evaluation at that point, and robots are not allowed to move during the evaluation period.
- Paused-timer arm movement: During timer pauses other than the evaluation period, teams may move the robotic arm, but the gripper must not be brought close to the gripping position.
- Autonomy (per run): A run = one complete T-shirt cycle (Steps 1 → 2 → 3). Teams declare one autonomy level per run (×1 / ×2 / ×4); the same level applies to all steps in that cycle. Different cycles in the same 15-minute window may use different levels.
- Custom grippers: Teams may install their own grippers in any design.
- Team-defined setup: The T-shirt stack position and robot arm base positions are decided by each team.
- Stack size: Each stack contains 5 T-shirts.
- Judge randomization: After the team sets the cloth position and declares ready, the judge panel will slightly move the T-shirt stack by 1-3 cm to prevent overfitting to a fixed gripping pose.
- Give-up option: Teams must set up all 5 T-shirts. Before the run starts, or at any time during the round, teams may tell the judges to give up one or more remaining T-shirts. Those T-shirts may then be removed by the team during a timer pause, and the remaining cloth position may be adjusted. Each removed T-shirt incurs a -0.5 penalty, with a maximum unhandled-cloth penalty of -2.5 per round.
- Pallet constraints: Modifications to the pallet are not allowed. Teams are only allowed to use helper parts/tools that are not attached to the pallet.
- T-shirt removal: T-shirt removal after a run is performed by the team, and the timer is stopped during removal.
Round flow: Teams prepare 5 T-shirts, place them in the desired locations, and move the robot arms to the desired initial positions. Teams then tell the judges whether they want to give up any cloth before the run starts.
If cloth is given up before the start, the team may remove those T-shirts and adjust the remaining cloth position during the timer pause. After that, the team informs the judges that they are ready, and the judges slightly move the T-shirt stack.
The team then asks the judges to start the run. Once the timer starts, touching the robot arm, clothes, pallet, or other task setup will trigger the human-intervention penalty. During the round, the team may still choose to give up any remaining T-shirts; the corresponding -0.5 per cloth penalty applies.
Step 1: Picking
Grasp a single T-shirt from a stack. The robot must identify and separate one T-shirt from the pile.
| Action | Description |
|---|---|
| 1a | Identify the topmost T-shirt on the stack |
| 1b | Grasp and separate a single T-shirt |
Success Criteria: Exactly one T-shirt securely grasped without disturbing the rest of the stack.
Step 2: Loading
Position and load the T-shirt onto the printing pallet.
| Action | Description |
|---|---|
| 2a | Transport T-shirt to the printing pallet |
| 2b | Place T-shirt onto the pallet surface |
Success Criteria: T-shirt placed on the pallet, covering the effective area appropriately.
Step 3: Alignment & Surface Quality
Align the T-shirt with pallet edges and ensure a flat surface without wrinkles.
| Action | Description |
|---|---|
| 3a | Align T-shirt edges with pallet boundaries |
| 3b | Smooth the surface to remove wrinkles |
Success Criteria: T-shirt is aligned and smooth in the target region.
Scoring
| Action | Points | Criteria |
|---|---|---|
| Pick + Load | +5 | Successfully picks a single T-shirt and loads it onto the pallet |
| Alignment | +2.5 | T-shirt is aligned in the target region. |
| Smooth Surface | +2.5 | T-shirt surface is smooth in the target region. This score applies only if alignment is achieved. |
| Multiple T-shirts picked | -5 | More than one T-shirt is placed onto the pallet in a single attempt. The target is to place only one T-shirt onto the pallet; incidental contact with another T-shirt does not by itself trigger this penalty. |
| Unhandled T-shirts given up | -0.5 each | If the team tells the judges they are giving up one or more remaining T-shirts, deduct 0.5 points per T-shirt removed. The maximum unhandled-cloth penalty is -2.5 per round. |
| Human manual intervention (Steps 1-3) | -5 | Once the timer starts, touching the robot arm, clothes, pallet, or other task setup during Steps 1 to 3 incurs a -5 penalty. |
Alignment definition: Alignment is counted when the T-shirt collar region is within the defined target region.
Surface smoothness definition: Surface quality is evaluated by the number of wrinkles on the target printing area.

Important evaluation area used for alignment and surface-quality assessment.
Autonomy multiplier. Each T-shirt cycle (Steps 1 → 2 → 3) is one run. Base points for that cycle are multiplied by the run's autonomy multiplier (×1 / ×2 / ×4). Teams declare one level per cycle; the same level applies to all steps in that cycle. See Autonomy Levels & Run-Based Scoring at the top of the page.
Example
A robot completes two rounds of T-shirt loading (base points, before applying per-run autonomy):
| Round | Action | Result | Score |
|---|---|---|---|
| 1 | Pick + Load | Success | +5 |
| 1 | Alignment | Aligned in target region | +2.5 |
| 1 | Smooth Surface | Smooth in target region | +2.5 |
| 2 | Pick + Load | Success | +5 |
| 2 | Alignment | Aligned in target region | +2.5 |
| 2 | Smooth Surface | Not smooth in target region | +0 |
| Total (base) | +17.5 | ||
Give-up example: If the team starts with 5 T-shirts, completes 1 cycle, and then tells the judges they are giving up the remaining 3 T-shirts, the unhandled-cloth penalty is -1.5. If the team gives up all 5 T-shirts, the penalty is capped at -2.5 for that round.
Good vs Bad Examples
Reference examples for alignment (collar region) and surface smoothness (wrinkle count on the target printing area).
Good Examples


Marginally Acceptable Example

Bad Examples





Human Demonstration
Sample task executions by human operators for reference.
Printing Pallet Setup
The printing pallet (55cm x 45cm, effective area: 54cm x 45cm) serves as the target surface for T-shirt loading. Teams must load the T-shirt flat and aligned on the white pallet surface, ready for screen printing.

Full Bill of Materials (T-shirt spec, pallet, mounting hardware) and supplier links: track-4-deformable-manipulation README → Bill of Materials.