Overview
The WBCD Competition challenges teams to solve real-world manipulation tasks that represent actual industry needs with billion-dollar market potential. Unlike typical research benchmarks, our tasks are carefully designed by leading robotics companies to address genuine commercial applications in logistics, life sciences, and manufacturing.
Compete for a $250K total prize pool, with first-place winners receiving a competition robot worth $50,000-$60,000. Teams will use bimanual teleoperation systems to complete complex tasks requiring coordinated dual-arm manipulation—a critical capability for next-generation automation.
Competition Tracks
Click on each track to explore detailed task descriptions and evaluation criteria.
View Open-Source Task Specifications on GitHub

Track 1: Logistics Picking
Mobile manipulation for item picking
Robot from Unitree
Track 2: Logistics Packing
Automated packing from conveyor to containers
Robot from Galaxea
Track 3: WBCD XtalPi Lab Experiments Track
Precision laboratory operations
Robot from AgileX
Track 4: Deformable Manipulation
T-shirt loading onto printing pallet
Robot from ARX
UMI Data Support
Access pre-collected UMI datasets for training and testing your manipulation policies

Simulation Support
Practice with our simulation environments before the real competition
On-Robot Test Labs
Access physical robot test facilities at Shanghai and Silicon Valley locations
UMI sample datasets from our sponsors: Lumos-UMI · IO-AI SenseXperience UMI · Genrobot Delivery Portal
Competition Format & Schedule
Key Dates
Competition Phases
Before Competition
At Competition
Info Session Resources
Slides
Recording
Awards
Track 1: Logistics Picking
Track 2: Logistics Packing
Track 3: WBCD XtalPi Lab Experiments Track
Track 4: Deformable Manipulation
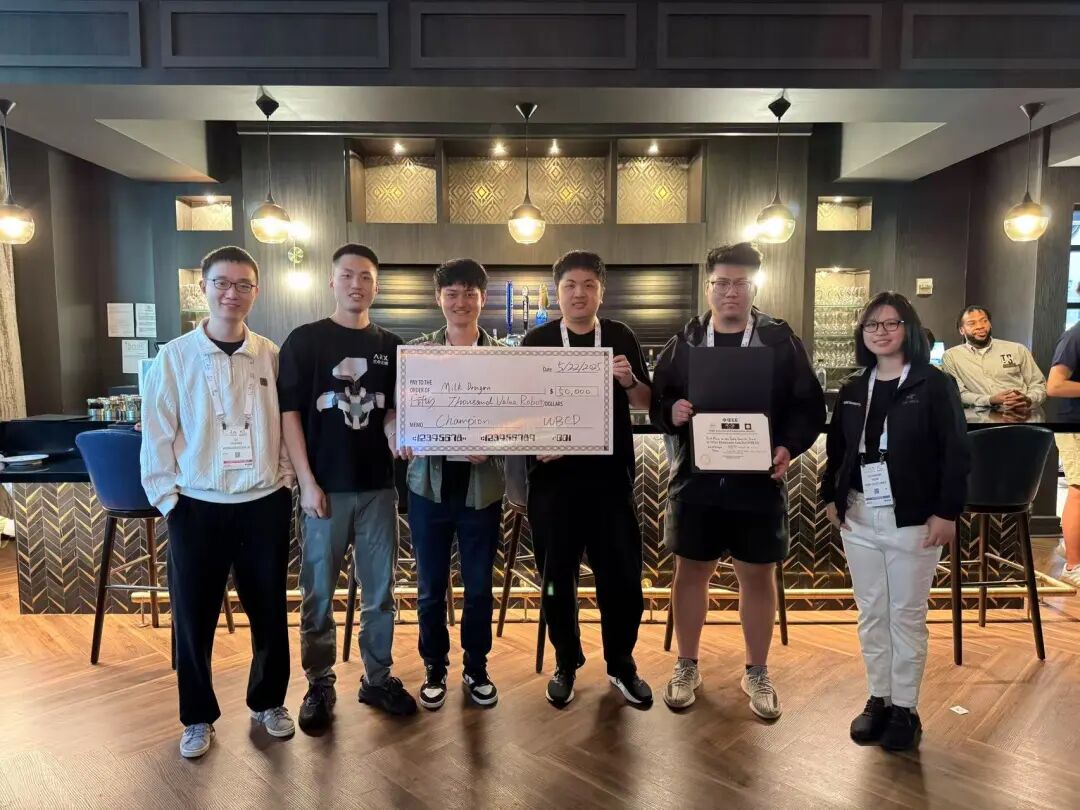
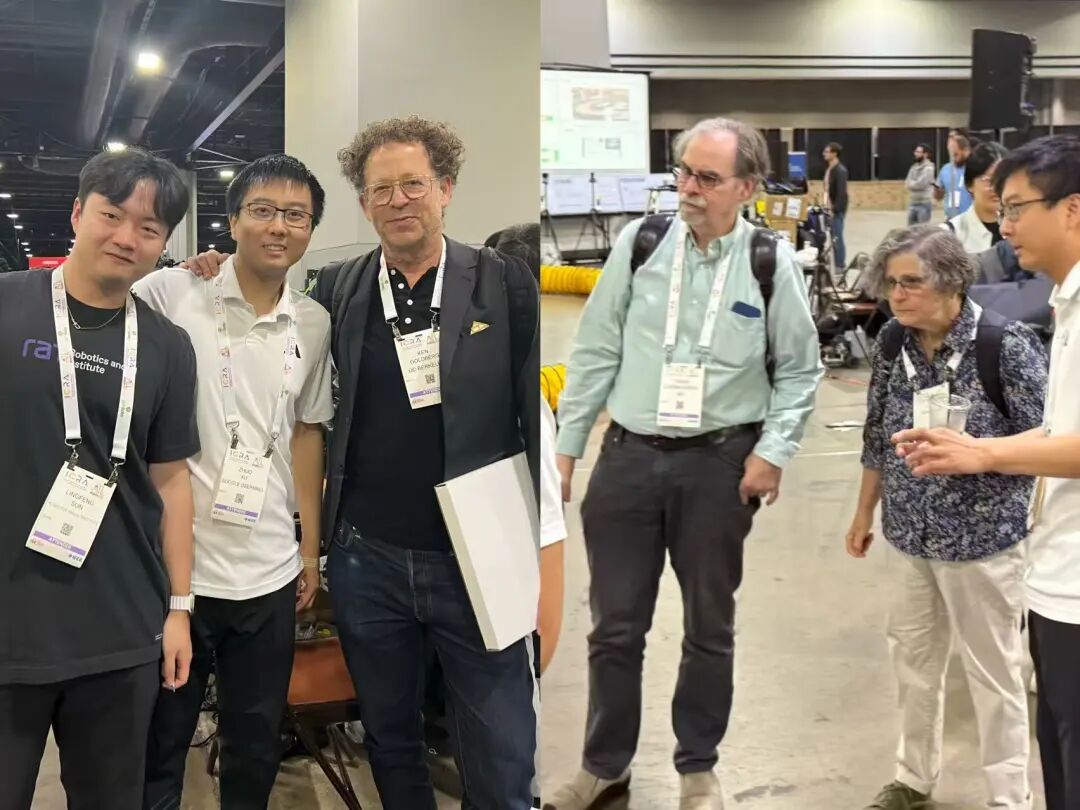
WBCD 2025 Highlights
Highlights Gallery










What People Said About WBCD 2025
"My motivation for supporting this competition is simple: just to encourage these young people to dare to think, dare to try, and to ensure they have the opportunity to persist in their efforts."- Zhang Yan, CEO of DataWiz
"This competition made us realize that robotics breakthroughs require both hardware reliability and algorithmic robustness. Every detail, from motor control parameters to inverse kinematics, can be critical."- EPFL Create Lab Team, Winner of Life Science Track
"We didn't choose simple 'pick and place' tasks. We chose flexible objects and bimanual coordination to define the direction for academia and industry over the next 1-2 years."- Josh, CEO of ARX
"It was a delightful experience; I met so many passionate people and learned a lot too. Thank you for organizing it."- Vismay Vakharia, Tata Consultancy Services (TCS)
"My goal is to make it really easy for anyone to set up their own robot... just connect via a VR headset and get a first-person feel for it. I'm just here to see what everyone else is building and have a good time!"- Davide Heydt (Spawn), Solo Participant & Platform Developer
"We were constantly debugging, collecting data, and training policies for three days straight. We were exhausted, but the moment we learned we won the championship, all the fatigue vanished."- Li Weize, Team Nailong (Joint team from Tsinghua, NWU, Gatech, Umich), Winner of Table Operations
"We see a trend where teams are mixing teleoperation with end-to-end models to create a 'data flywheel.' It's a paradigm shift in the robotics industry, and it is very exciting."- Huang Di, WorldEngine AI












Organizers
Zhuo Xu
Research Scientist, Google Deepmind
Lingfeng Sun
Research Scientist, Robotics and AI Institute
Dennis Gu
General Manager of WBCD Competition
Peter Yu
CTO, XYZ Robotics
Long Chen
Principal Scientist, Xiaomi EV
Yao Mu (Mark)
Assistant Professor, AI Institute, Shanghai Jiao Tong University
Huazhe Xu (Harry)
Assistant Professor, Tsinghua University
Michael Cho
Founder, Frodobots Lab
Danfei Xu
Assistant Professor, Georgia Tech
Weize Li
PhD Student, Clemson University
Tianxing Chen
PhD Student, HKU
Kaifeng Zhang
PhD student, Columbia University
Xinghao Zhu
Researcher, NVIDIA
Shenli Yuan
Researcher, NVIDIA
Tao Chen
CEO, Dexmate
Toru Lin
PhD Candidate, UC Berkeley
Di Huang
CEO, World Engine AI
Xiangyu Chen
Founder at IO-AI
Max Yin
CEO at CyberOrigin
Calvin Zhou
Co-Founder at RoboForce
Wenhao Yu
Staff Research Scientist, Google Deepmind
Yong-Sik Kim
NIST
Joseph J. Lim
Associate Professor, KAIST
Xiaohan Zhang
Research Scientist, Robotics and AI Institute
Hongyu Li
Ph.D. candidate, Brown University
Xiangyu Chen
Graduate Student, HKUST(GZ)
Paul HungHon Cheng
Postdoctoral Researcher, EPFL
Qinghua Guan
Postdoctoral Researcher, EPFL
Cheng Pan
Ph.D. Candidate, EPFL
Shihan Lu
Postdoctoral Researcher, Northwestern University
Yang Ning
Senior System Engineer, ByteDance
Zhigen Zhao
PhD Candidate, Georgia Tech
Longteng Fan
Undergraduate, SJTU
Meiding He
Deep Tech Journalist
Yijia Yang
MBA Candidate at MIT Sloan
Celia Zhang
Student Researcher, Purdue University
Charlie Cheng
Researcher at UC Berkeley
Xiatao Sun
PhD Candidate, Yale University
Yuhang Zheng
PhD Student, NUS